MC403
in 5 variants

MC403 - MC403-Z
P821 (MC403-Z) | P822 (MC403-Z) | P823 (MC403) | P824 (MC403) | P825 (MC403)
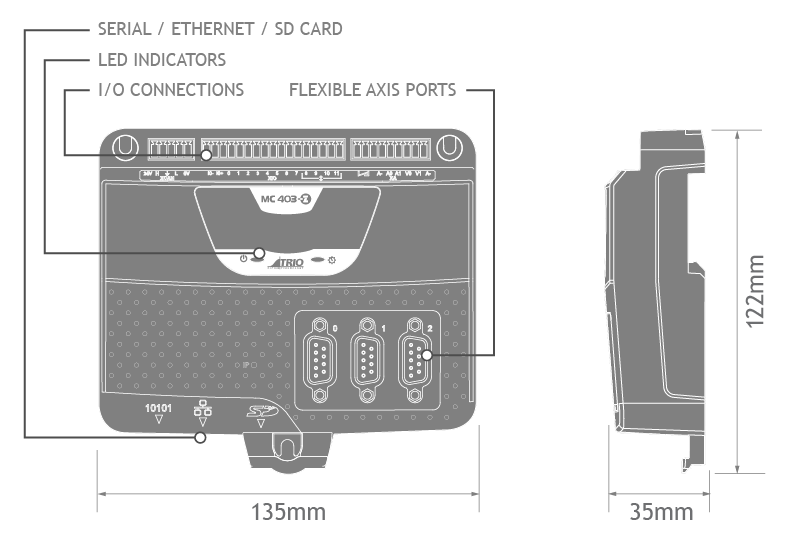
The MC403 is a high specification Motion Coordinator using a high performance ARM11 processor, with three flexible axis ports and two Voltage outputs.

Highlights
- Advanced 2 Axis Closed Loop Servo / 3 Axis Pulse Direction
- Linear, Circular, Helical and Spherical Interpolation
- Flexible CAM shapes, Linked Motion
- Biss, EnDAT and SSI Absolute Encoder Supported
- Hardware Linked Outputs for Camera / Laser Control
- Ethernet-IP / Modbus TCP / Ethernet Interface Built-In
- 125 – 2000 µsec Selectable Servo Update
- Precise 64 bit Motion Calculations on ARM11 Processor with VFP
- IEC 61131-3 Programming
- Multi-tasking BASIC Programming
- Text File Handling
- Robotic Transformations
- Micro SD Memory Card Slot
- CANopen I/O Expansion
- RoHS, UL Listed, CE approved
Scalability
The MC403 is available in 2 model formats offering 5 different axis configurations. The entry level MC403-Z does not have a built-in DAC, whereas the MC403 DAC can be used as a general purpose analogue output or for servo control where available.
All models feature a total of 16 axes in software. Any axes not assigned to built-in hardware can be used as a virtual axis. Every axis can be programmed to move using linear, circular, helical or spherical interpolation, electronic cams, linked axes and gearboxes.
Plug & Program

The built-in Ethernet port allows programming and connection of common HMI and PLC protocols directly to the MC403. User programs can be written in Trio’s established multi-tasking TrioBASIC language using the powerful Motion Perfect application development software making complex motion easy. Also available as an option are the industry standard IEC 61131-3 languages allowing a fully functional PLC programming system.
Connectivity

The flexible axis ports can be configured in software as feedback devices or pulse direction outputs. As outputs they can be used as pulse and direction with stepper or servo drives or they can operate as a simulated encoder output. When configured as feedback they can be either incremental encoder input or one of four popular absolute encoder types; SSI, Tamagawa, Endat or Biss. Any feedback axis with a Voltage output can be used to form a closed loop servo.